
A paradigm is a “model, pattern, example, exemplar, template, standard, prototype, archetype.” In modeling instruction, they are typically a demonstration or lab setup that serves to focus student attention on what is important in the unit. Paradigms are presented as the subject of a student-designed lab that is usually done at the beginning of the unit, and serves to help develop the conceptual model(s) for the unit.
If in-person school is not possible, I intend to make short videos showing the data collection of each lab. Students will “collect” the data from the video and analyze it at home.
Next year I will be teaching Mechanics as a full-year course, so there should be enough time to do all (or at least most) of these labs.
Unit 1:Kinematics
Lab 1 – Introductory lab – Three linear paradigms in one lab
Constant Velocity Model – Blinky Buggy toy moves with constant velocity
Constant Acceleration Model (possibly with vectors) – Physics Fan cart moves with constant acceleration. Fan may be modified by changing angle and speed.

Non-constant Acceleration Model – Sliding Chain (over a pulley) breaking the constant acceleration model.
Lab 2 – Another paradigm later on:
Circular Motion Model – (The Knight Textbook works a bit of circular motion into 2-d kinematics) – Rotating wheel slowing with constant acceleration. Probably use a Vernier Rotary Motion Sensor with an attachment. Another possibility is a bicycle wheel.
Unit 2: Newton’s Laws of Motion
Lab 3 – Introductory lab
Constant Net Force Model – Fan Cart (with fan directed at angles for vectors). Develop Newton’s Second Law.
Labs 4 and 5 – Later on
Connected Objects Model – Atwood’s Machine, collect a data set using the materials from which the gravitational field strength of Earth can be derived.

Non-uniform Force Model – Falling Coffee Filters (Is the drag force proportional to v or v2 ?)
Unit 3: Work, Energy, and Power
Lab 6 – Introductory lab
Energy Transfer Models – Work on a spring transfers to kinetic energy (with Pasco Spring Cart Launcher); Work on Earth’s g-field transfers to kinetic energy. Collect data with Dynamics Carts, Dual-Range Force Sensors and Motion Detectors.

Lab 7 – Later on
Energy Dissipation Model – Ball Bounce Lab. What does the position vs. time data of a bouncing ball tell us about energy dissipation?
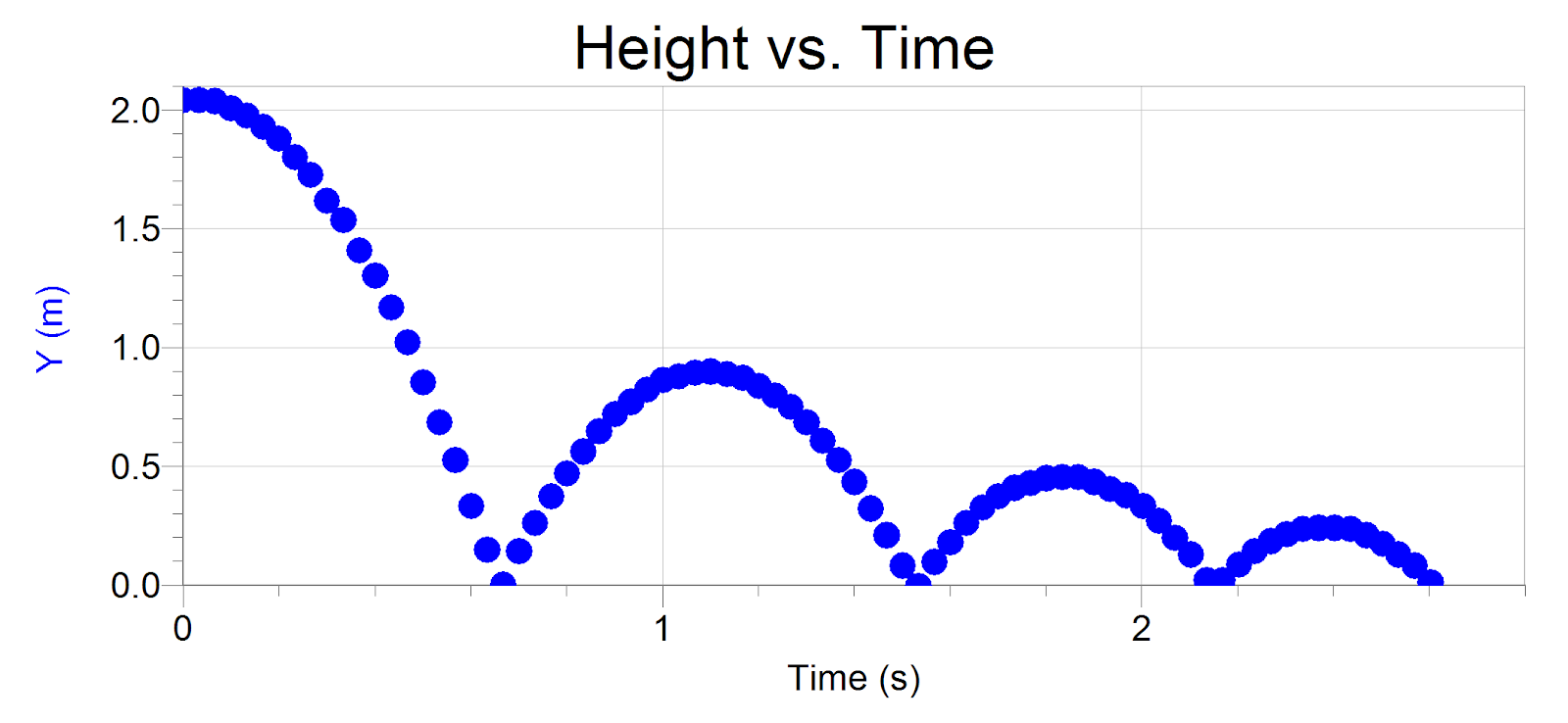
image from Frank Noschese’s Blog
Unit 4: Systems of Particles and Linear Momentum
Lab 8 – Introductory lab
Impulse-Momentum Transfer Model – Force-time during a collision and change in Momentum. Using dynamics carts, Vernier Bumper-Launcher Kit (and maybe Pasco Spring Cart Launcher)

Lab 9 – Later investigation
Modeling Collisions – Dynamics Cart collisions in one dimension
Unit 5: Rotation
Lab 10 – Introductory Lab
Extended Object Model – Rotational Inertia and Angular Acceleration. Vernier Rotary Motion Sensor and accessory kit again.

Unit 6: Oscillations
Lab 11 – Introductory Lab
Simple Harmonic Oscillator Model – Dependent variables that affect period/frequency of a mass-spring system. I like Pasco Springs for this. Equal Length and Hooke’s Law Set. They look the same, but are different:

Lab 12 – Later on
Physical Pendulum Model – Dependent variables that affect period/frequency of an extended object pendulum. Vernier Rotary Motion Sensor and Accessory kit, again.
Unit 7: Gravitation
Lab 13 – Introductory Lab
Universal Gravitation Model – Cavendish Balance (classroom demonstration, I don’t have the money to buy a balance that provides quantitative results). Thinking of either setting up my own for demo purposes, or showing the YouTube videos of other’s.
Questions or comments? Other ideas? Please share!
